Vorbereitung
3 / 12
Welche Einstellungen gibt es und wie kann ich den Einstellungsmodus aufrufen?
-
Der Thymio II verfügt über drei spezielle Einstellungsmodi: Lautstärkeneinstellung, Motorkalibrierung
und drahtlose Kopplung.(Veraltet, bitte verwenden Sie die Kopplungsfunktion der Thymio Suite 2.0. Detaillierte Anweisungen finden Sie in dieser FAQ)
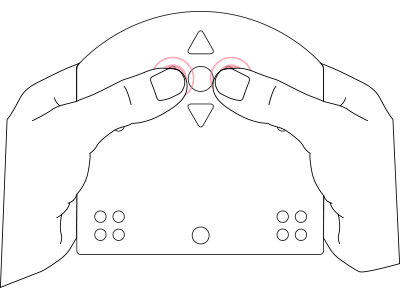
Tippen Sie im Menü zur Auswahl des Verhaltens gleichzeitig 3 Sekunden lang auf die linke und rechte Taste (siehe Abbildung), um das Einstellungsmenü aufzurufen. -
Ist der Thymio im Einstellungsmodus, blinken die LED auf der Vorderseite rot. Jetzt kann mit den Pfeiltasten der gewünschte Einstellungsmodus gewählt werden. "Gelb" für die Lautstärkeeinstellung und "Grün" für die Kalibrierung der Motoren.
-
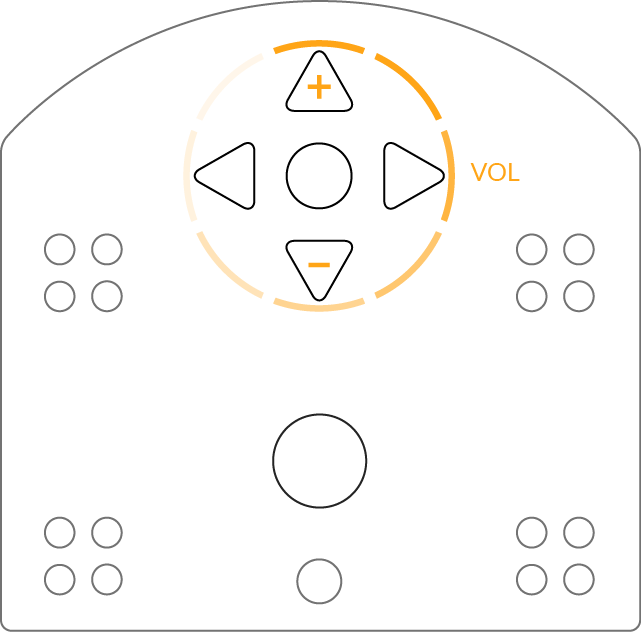
Orange: Lautstärke einstellen
-
Verwenden Sie die Vorwärts- und Rückwärtspfeile, um die Lautstärke einzustellen. Die Lautstärke wird auf dem Roboter über den gelben LED-Kreis angezeigt. Um Ihre Auswahl zu speichern und den Einstellungsmodus zu verlassen, schalten Sie den Thymio einfach aus, indem Sie die mittlere Taste 3 Sekunden lang gedrückt halten.
-
Grün: Motorkalibrierung
-
⚙ einstellung2
-
In diesem Modus können Sie die Geschwindigkeit der Motoren feinabstimmen, wenn der Roboter nicht geradeaus fährt.
- Drucken Sie diese PDF-Datei https://cloud.medienzentrum.rocks/s/dpSM9RKmTzqZ37M aus und kleben Sie sie auf einen Tisch oder den Boden (drucken Sie die Datei auf zwei A4-Seiten in 100 % Größe und kleben Sie diese zusammen; alternativ können Sie auch eine einzelne A3-Seite ausdrucken) und stellen Sie den Roboter zwischen die Linien.
-
Mit den Tasten „vorwärts“ und „rückwärts“ bewegt sich der Roboter vorwärts und rückwärts. Drücken Sie sie einmal, zweimal oder dreimal, um die Geschwindigkeit zu ändern. Sie können überprüfen, ob der Roboter bei verschiedenen Geschwindigkeiten geradeaus fährt. Wir empfehlen Ihnen, für eine bessere Reproduzierbarkeit die mittlere Geschwindigkeit zu wählen.
-
Mit den Tasten „links“ und „rechts“ erhöhen oder verringern Sie die Korrektur in Fahrtrichtung: Wenn der Roboter nach rechts abbiegt, drücken Sie mehrmals die linke Taste, um die Richtung zu korrigieren, bis er geradeaus fährt, und umgekehrt, wenn er nach links abbiegt, drücken Sie mehrmals die rechte Taste. Je öfter Sie drücken, desto größer ist die Korrektur.
-
Wenn der Roboter geradeaus fährt, drücken Sie die mittlere Taste 3 Sekunden lang. Dadurch wird der Roboter ausgeschaltet und die Korrekturwerte werden im Langzeitspeicher gespeichert.
-
Schalten Sie den Roboter ein und überprüfen Sie die Ergebnisse der Kalibrierung, indem Sie das vorprogrammierte gehorsame (magenta) Verhalten ausführen.
- Hier ist ein Video, das ein Kalibrierungsbeispiel zeigt: https://youtu.be/JRuzOlmny-c?si=_qrL7oTsOgMkI7Zo